TURN.LSP Theory
>> Drop your fears at the door; love is spoken here. Enjoy the free libre HawsEDC AutoCAD tools too. <<
| HawsEDC |
| Engineering, Drafting,
and Computing |
TURN.LSP TURNING MODEL THEORY
THEORY
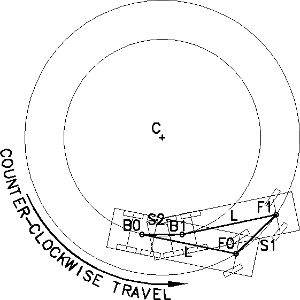
For each computation step, a vehicle wheel (or axle set) pair (front and back) is assumed
to be traveling in a circle as though the steering wheel or articulating hinge
were locked. The front and back wheels (axle sets) are circumscribing two concentric
circles, with the line between back and front wheel always tangent to the
inner circle being made by the back wheel, as shown:
The initial locations of the back and front wheels (axle sets) are known (B0 and F0), and the
final location of the front wheel is known (F1).
Then the turned angle F0|C|F1=B0|C|B1=2*atan{sin(alpha)/[2*L/S1-cos(alpha)]}
where
- S1=the distance from F0 to F1
- L=the distance from B0 to F0, the wheelbase length
- alpha=angle F1|F0|B0
Vector addition is the method
for deriving this equation.
The sum of the x components traveling around
the shape from B0 to F0, F1, B1, and back to B0 should be zero.
Then -L*sin(D)+S1*sin(pi-(C+D))-L*sin(D)+0=0
and gathering terms, S1*sin
(pi-(C+D))-2*L*sin(D)=0, or S1*sin (pi-(C+D))=2*L*sin(D).
S1*sin(C+D)=2*L*sin(D)
S1*sin(C)*cos(D)+S1*cos(C)*sin(D)=2*L*sin(D).
Dividing by S1*sin(D) and replacing
cos(D)/sin(D) with cot(D),
sin(C)*cot(D)+cos(C)=2*L/S1
Solving for D,
sin(C)*cot(D)=2*L/S1-cos(C),
cot(D)=2*L/(S1*sin(C))-cot(C),
cot(D)=[2*L/(S1)-cos(C)]/sin(C),
tan(D)=sin(C)/[2*L/(S1)-cos(C)],
and D=atan{sin(C)/[2*L/(S1)-cos(C)]}